WEEK 8
6 Graph Algorithms
6.1 Definitions
- \(G( V, E )\) where \(G\) = graph, \(V = V( G )\) = finite nonempty set of vertices, and \(E = E( G )\) = finite set of edges.
Undirected graph
- \(( v_i , v_j ) = ( v_j , v_i )\) = the same edge.
Directed graph(diagraph)
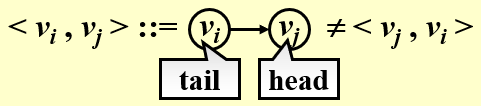
Restrictions
- Self loop is illegal.
- Multigraph is not considered.
Complete graph
- A graph that has the maximum number of edges.

Adjacent


Subgraph
Path
- Path(\(\subset G\)) from \(v_p\) to \(v_q\) = \(\{v_p,v_{i1},v_{i2},\cdots,v_{in},v_q\}\) such that \((v_p,v_{i1}),(v_{i1},v_{i2}),\cdots,(v_{in},v_q)\) belong to \(E(G)\)
Length of a path
- number of edges on the path
Simple path
- \(v_{i1},v_{i2},\cdots,v_{in}\) are distinct.
Cycle
- simple path with \(v_p=v_q\)
Connected
- \(v_i\) and \(v_j\) in an undirected \(G\) are connected if there is a path from \(v_i\) to \(v_j\) (and hence there is also a path from \(v_j\) to \(v_i\))
- An undirected graph \(G\) is connected if every pair of distinct \(v_i\) and \(v_j\) are connected
(Connected) Component of an undirected G
- the maximal connected subgraph
Tree
- a graph that is connected and acyclic(非循环的)
DAG
- a directed acyclic graph
Strongly connected directed graph G
- For every pair of \(v_i\) and \(v_j\) in \(V( G )\), there exist directed paths from \(v_i\) to \(v_j\) and from \(v_j\) to \(v_i\).
- If the graph is connected without direction to the edges, then it is said to be weakly connected
Strongly connected component
- the maximal subgraph that is strongly connected
Degree
-
number of edges incident to v
-
For a directed G, we have in-degree and out-degree.
-
Given G with \(n\) vertices and \(e\) edges, then $$ e=(\sum_{i=0}^{n-1}d_i)/2\quad where\quad d_i=degree(v_i) $$
6.2 Representation of Graphs
Adjacency Matrix

Note : If G is undirected, then adj_mat[][] is symmetric. Thus we can save space by storing only half of the matrix.

-
This representation wastes space if the graph has a lot of vertices but very few edges.
-
To find out whether or not \(G\) is connected, we’ll have to examine all edges. In this case \(T\) and \(S\) are both \(O( n^2 )\).
Adjacency Lists
- Replace each row by a linked list

Note : The order of nodes in each list does not matter.
- For undirected \(G\), \(S\) = \(n\) heads + \(2e\) nodes = \((n+2e)\) ptrs + \(2e\) ints
- Degree(i) = number of nodes in graph[i](if \(G\) is undirected)
- \(T\) of examine \(E(G)\) = \(O(n+e)\)

Adjacency Multilists

- Sometimes we need to mark the edge after examine it, and then find the next edge.
Weighted Edges
- adj_mat [ i ] [ j ] = weight
- adjacency lists / multilists : add a weight field to the node
6.3 Topological Sort 拓扑排序 不是一种严格意义的排序算法
AOV activity on vertices Network 有向无环图
- digraph \(G\) in which \(V( G )\) represents activities and \(E( G )\) represents precedence relations
- Feasible AOV network must be a directed acyclic graph(DAG).
- \(i\) is a predecessor of \(j\) = there is a path from \(i\) to \(j\)
- \(i\) is an immediate predecessor of \(j\) = \(< i, j > \in E( G )\). Then \(j\) is called a successor(immediate successor) of \(i\)
Partial order
- a precedence relation which is both transitive and irreflexive
Note : If the precedence relation is reflexive, then there must be an \(i\) such that \(i\) is a predecessor of \(i\). That is, \(i\) must be done before \(i\) is started. Therefore if a project is feasible, it must be irreflexive.
[Definition] A topological order is a linear ordering of the vertices of a graph such that, for any two vertices, \(i\), \(j\), if \(i\) is a predecessor of \(j\) in the network then \(i\) precedes \(j\) in the linear ordering.
Note : The topological orders may not be unique for a network.
\(注意E的范围 最小 V 最大 |V|^2\)